This post is also available in: 英語
自動車産業において,電気自動車に次ぐ革命として自動運転技術の開発が進められている。自動運転を行うためには,自動車の周囲の情報を3 次元的に得る必要があり,車載用の高精度に3D センシングが可能な方法として,LiDAR(Light Detection And Ranging:光による検知と測距)がある。車載用LiDAR の市場は2018 年で15 億円程度であるが,今後自動運転技術の進歩に伴い,2024 年までには1400 億円の市場にまで達することが予測されている1)。
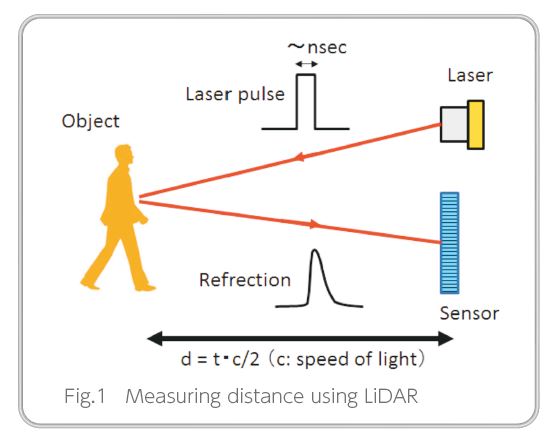
LiDAR の原理は,レーザーをパルス状態で対象物に照射し,発光してから反射光を検出するまでの時間tを用いて,対象物との距離d を算出する(Fig.1)これはToF(Time of Flight)と呼ばれる技術であり,今後この原理を用いたセンシングデバイスはさらに増加していくものとみられる。
この原理を用いたLiDAR は,①繰り返し発光するパルスレーザーと走査機構を用いた走査型LiDAR と,②高出力の単一パルスレーザーと2 次元受光素子アレイを用いたフラッシュ型LiDAR の2 種類に大きく分けられる。
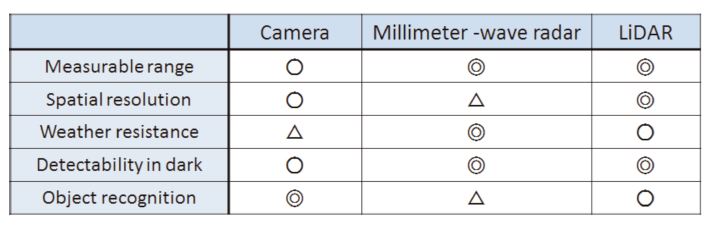
現在実用化されているカメラやミリ波レーダーを用いた方式とは違い,LiDAR では赤外レーザーを用いている。Table 1 にそれぞれの特徴を一覧にした。ミリ波レーダーと比較して波長の短い赤外光を用いているため,検出の空間分解能が高く,歩行者や自転車等の検出も可能になっている。霧や雨などの悪天候時では,ミリ波レーダーと比べて検出性能が低下するが,夜間では同等の検出性能が得られる。
車に搭載する特性上,デザイン面での小型化や,他のセンシングデバイスと比較して高価なため低コスト化が要求されている。そこで,赤外光源には小型な半導体レーザーが用いられている。LiDAR の普及に伴い,センシング関連の半導体レーザー市場も2018 年の180億円から,2024 年には700 億円にまで成長することが期待されている2)。
本稿では,LiDAR に用いられる半導体レーザーを紹介し,半導体レーザーの製造プロセスにおける課題と対策について,ドライプロセス技術がどのように用いられているかについて記述する。
(※この記事は、2019年9月発行のテクニカルジャーナルMo.83に掲載されたものです。)
記事の続きは下記URLよりアルバックテクニカルジャーナルに
ユーザ登録するとご覧いただけます。
https://www.ulvac.co.jp/r_d/technical_journal/tj83j/
文 献
1) P.Boulay, A.Debray, LiDAR for Automotive and Industrial Applications 2019 Report, (Yole
Development, 2019)
2) M.Vallo, P.Mukish, Edge Emitting Lasers: Market & Technology Trends report(Yole Development, 2019)